
Aprendé a reparar TV
AQUÍ !


Microcontroladores - Robótica

Aprenda a soldar SMD !

Repare Ud. mismo su
Control Remoto

Realización de un
Servosistema con un Motor DRUM
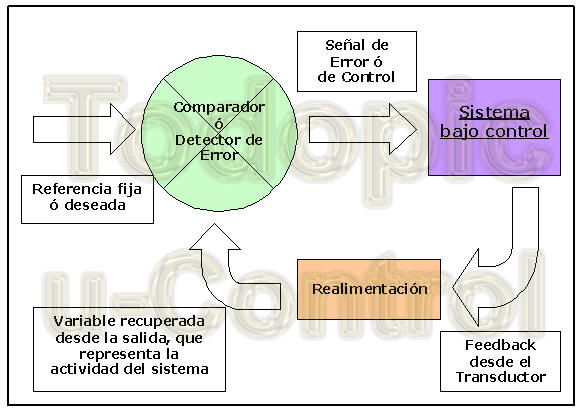
Definición de “Servosistema” ó “Sistema de Control Automático”
“Un sistema de control por realimentación, es aquel que tiende a mantener una relación predeterminada entre una variable de sistema y otra, comparando funciones de ambas variables y empleando la diferencia como medio de control” (AIEE) (American Institute of Electrical Engineers).
GENERALIDADES
Vamos a comenzar a ver el funcionamiento del sistema, desde el Comparador ó Detector de Error.
A él ingresaremos una señal ó información equivalente a lo que deseamos lograr como resultado de funcionamiento del sistema.
Ésta información, deberá poseer una exactitud importante, para así obtener un sistema funcionando a un régimen, con un alto grado de precisión.
Imaginemos tener un sistema que, en un instante cualquiera, una causa exterior o interior, modifican el régimen de trabajo del mismo. El sistema de control debe reaccionar y comenzar la acción correctiva que le ha sido asignada, actuando con rapidez y precisión. Pero para que ello ocurra, debe existir un elemento que tenga la capacidad de verificar la existencia de ése error.
Ése elemento es el Detector de Error, al cuál podemos considerar como el componente “inteligente” del sistema, a partir del cual se inicia el proceso de regulación.
La acción del detector es comparativa, implicando que debe haber homogeneidad entre las señales sometidas a esa acción, es decir, las señales a comparar deben ser equivalentes entre sí en magnitud y naturaleza, por ejemplo dos señales eléctricas, dos informaciones mecánicas, etc.
Captar las variaciones experimentadas por la salida del sistema controlado, implica el uso de un Transductor.
Entre los requisitos fundamentales de un buen transductor, están los de tener una adecuada sensibilidad para reaccionar frente al error, una elevada precisión y buena confiabilidad.
Normalmente, la señal de error tomada por el transductor, no posee la suficiente potencia y forma, para excitar directamente al sistema comparador, siendo necesario el uso de conformadores de señal y amplificadores para adaptar las mismas a una magnitud útil para el comparador ó detector de error.
Resumiendo lo dicho hasta aquí, podemos decir que tenemos una señal que indica el régimen de trabajo del sistema; un elemento ejecutor de la operación deseada; un transductor que toma información de cómo está resultando el funcionamiento y un sistema “inteligente” que es capaz de darse cuenta gracias a éste feedback, si debe corregir el régimen de funcionamiento ó no, cerrando de esta manera el lazo que forma nuestro Sistema de Control Automático o Servosistema (1).
(1) Servo, del latín “servus” (esclavo).
NUESTRA APLICACIÓN
Hablando de ejemplos y aplicaciones típicas de éste tipo de controles, podemos mencionar muchos entre los que se destacarían por ejemplo, los sistemas de sintonía de los TV, los controles de velocidad de los motores de un DVD Player, de un VHS, la generación de la frecuencia de transmisión de una emisora de radio, el control de posición de un brazo mecanizado (robot), un radar, un sonar, un amplificador de audio de buena calidad y una lista interminable de usos donde encontraremos el uso de un sistema retroalimentado.
El ejemplo que motiva éste artículo, es la utilización de un motor que encontraremos disponible en cualquier tienda de Electrónica, ó entre los trastos viejos en nuestra casa, y es el motor portacabezas del VHS ya abandonado y cambiado por el DVD.
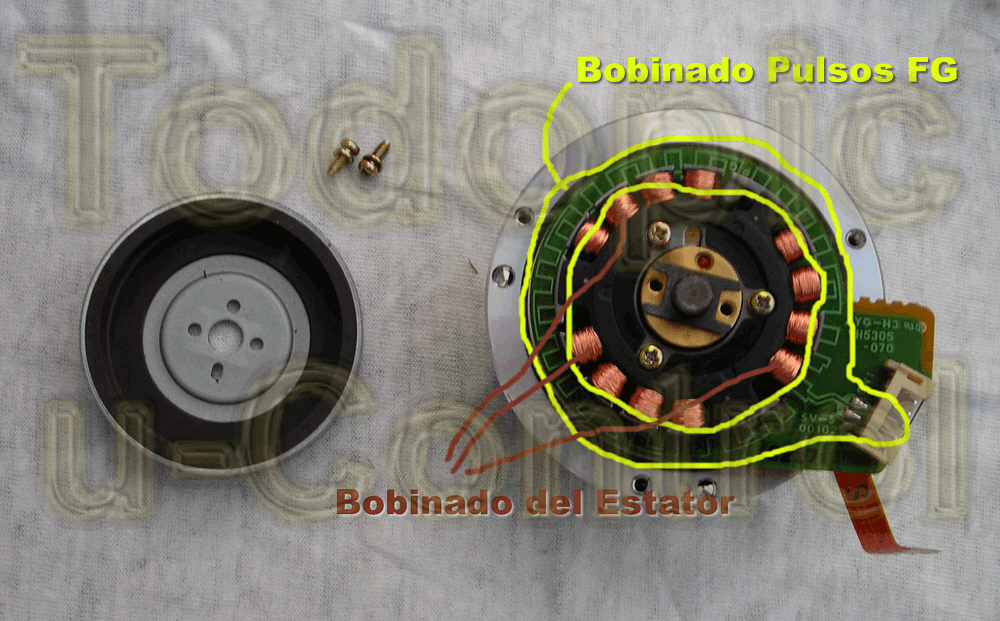
El nombre con el que también se lo conoce a dicho motor es DRUM. Un ejemplo del mismo podemos ver en las fotografías adjuntas.
Éste tipo de motores nos permite desarrollar técnicamente toda la teoría enunciada hasta aquí, pudiendo destinar su uso a aplicaciones que requieran un control exacto de la velocidad, tal cómo puede ser un Propeller Clock, dispositivo para el cual será utilizado un motor de éste tipo.

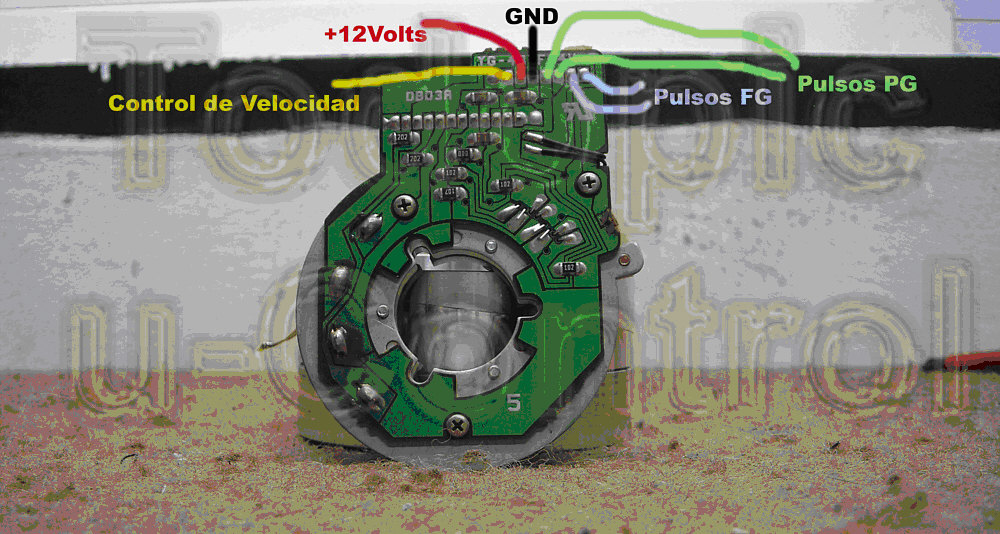
Éstos motores poseen un conector que los enlaza al exterior, presentándose en el mismo, las siguiente presentación la cuál variará de un fabricante a otro y de un diseño de motor a otro, por lo que no podemos expresar un orden de conexionado igualitario para todos los motores que consigamos.
Todos los modelos, aunque utilicen el mismo circuito integrado para comandar el sistema, serán distintos, por lo que deberemos tomarnos el trabajo de descubrir nosotros mismos las conexiones a saber.
- Alimentación +12 Volts
- GND
- Entrada de Control de Velocidad
- Salida Pulsos PG
- Salida Pulsos FG
Luego veremos la forma de encontrar y diferenciar éstas conexiones. Ahora haremos una breve reseña de lo que haremos y qué tratamos de lograr.
Arrancaremos el proyecto con el objetivo de:
(1)
Hacer funcionar éste motor
(2)
A un régimen de RPM elegido a voluntad
(3)
Con una precisión total en el margen de las pocas partes por millón.
Tres objetivos por cierto muy ambiciosos, pero muy reconfortantes de lograr al final del proyecto.
El sistema propuesto trabaja de la siguiente manera según lo muestra el diagrama en bloques:
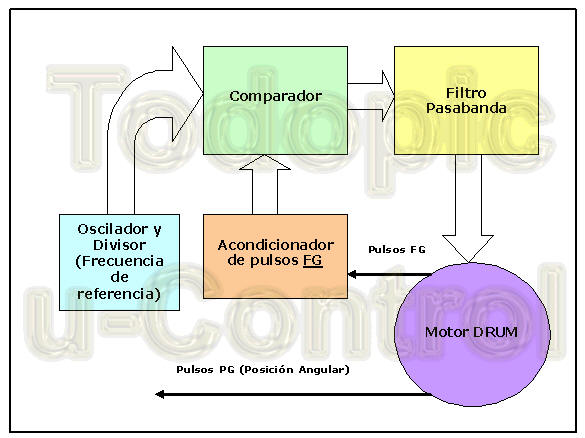
Primeramente hablaremos del Oscilador el cual estará realizado sobre la base de una compuerta de un CD4011 y un cristal que poseerá una frecuencia por ahora no conocida, para concluir en otra compuerta del mismo IC utilizada como buffer aislador de la osciladora propiamente dicha.
Luego de esto, vendrá una cadena de contadores/divisores, con los que obtendremos la frecuencia de referencia que usaremos para entrar al comparador y a través de éste lograr la tensión del control de velocidad del motor y por ende el régimen de trabajo que deseamos para el mismo.
Los motores DRUM, poseen un bobinado estampado en el impreso de su placa de control, el cual nos entrega una serie de impulsos al girar el motor, que conoceremos como Pulsos FG.
Estos impulsos poseen una frecuencia que no va en concordancia con las RPM (Revoluciones Por Minuto) del motor, ni con las RPS (Revoluciones Por Segundo) del mismo, sino que están diseñadas para generar frecuencias acordes a su funcionamiento dentro de la circuitería del VHS.
Por ejemplo en reproducción, en sistema NTSC, deben girar a 30 vueltas por segundo lo que equivale a 1800 RPM, mientras que en PAL lo hacen a 25 vueltas por segundo, es decir a 1500 RPM, pudiendo nosotros movernos por todo el margen de velocidad que cubren estos motores, que es de unas 1000 a 3000 RPM, ó más, dependiendo del motor que escojamos, pero para los efectos de visualización cómoda del efecto que se intenta observar con el GIROPLAY, un régimen de 25 a 30 Hz., es más que suficiente.
Luego de haber conocido éstos valores, podemos agregar también que los Pulsos FG, poseen 24 veces la frecuencia de giro en Hertz. Es decir, a 25 Hz. (1500 RPM) tendremos una frecuencia de impulsos de 600 Hz.; a 30 Hz. (1800 RPM), tendremos 720 Hz; mientras que a 2500 RPM, lograremos una señal de 1Khz.
Conociendo éstos valores, podremos diseñar nuestro oscilador local, en función de las RPM que deseemos lograr del motor.
En nuestro caso, para el desarrollo del ejemplo explicativo, hemos seleccionado un valor de 2500 RPM, (41,66….Hz.) para la velocidad de giro, lo que nos dará impulsos FG a 1Khz.
Porqué decidimos usar éste valor? Muy sencillo!
Es fácil generar 1Khz a partir de un oscilador de 2Mhz y un divisor por 2000 tal cómo hemos decidido hacer y pueden ver en el diagrama esquemático de la aplicación.
Uds., tal vez crean conveniente usar un oscilador de 4,5 Mhz y un divisor por 7500 para lograr 600 Hz y usar una velocidad de 1500 RPM, ó tal vez quieran usar otro valor de acuerdo a los cristales y/o divisores que posean, pero lo importante aquí, es que comprendan que debemos lograr la misma frecuencia que nos entregará el bobinado FG, para las RPM deseadas.
Los pulsos entregados por el bobinado FG, será una señal senoidal que debemos conformar para poder atacar al Comparador ó Detector de Error.
Bastarán dos transistores NPN comunes conectados en cascada, para lograr en el segundo transistor, una situación de saturación y corte debido a la alta amplificación del primero. Un par de compuertas sobrantes del CD4011, nos servirán para terminar de aislar, obtener la amplitud correcta y darle la forma cuadrada a la señal para entrar en el Comparador, de la misma forma que entrará la señal del oscilador fijo.
Siguiendo con la explicación del circuito, pasamos a la parte “inteligente” del proceso y nos encontramos con el Comparador ó Detector de Error, que es uno de los comparadores de fase que posee en su interior el circuito integrado CD4046.
Para darle mayor precisión al sistema y hacer más inmune al sistema a los ruidos externos, hemos decidido utilizar el Comparador de Fase II del IC.
Ésta etapa del circuito integrado, está formada por una serie de Flip-Flops que nos devolverán una tensión proporcional en tiempo y forma de onda, al desfasaje que exista entre las señales de referencia fija y la obtenida a través de los impulsos FG. Es decir, que a mayor diferencia de frecuencia entre las señales entrantes, mayor señal de error.
A medida que las frecuencias se van acercando entre sí, la excursión de la señal de error comienza a hacerse cada vez más estable, tratando de encontrar el exacto punto de igualdad entre ambas, hasta que la fase de las mismas coincida en el eje de tiempos.
La salida del comparador de fase, será aplicada a un filtro pasabajos el que se encargará de entregarnos la señal de error que el mencionado comparador encuentre entre el giro del motor y el oscilador fijo.
Es aquí donde empieza a cerrarse el lazo de control de velocidad del motor.
Es aquí donde comienza a tomar forma el Lazo Enganchado en Fase, que conocemos cómo PLL (Phase Loocked Loop).

Click en la imagen para agrandar
LUZ, CÁMARA, ….. ACCIÓN !
Al conectarse la alimentación, el motor comenzará a girar debido a que el Comparador entregará una señal de error importante, hasta que la frecuencia del oscilador de referencia, con su correspondiente división, coincida con los impulsos FG, para en ése momento, “engancharse” ambas señales y de ésa forma mantener estable la velocidad con una exactitud sorprendente pese a las perturbaciones externas a las que quiéramos someter al sistema.
Sistema denominado Lazo Enganchado en Fase ó PLL.
Vea el siguiente VIDEO, donde se puede notar las dos señales que ingresan al Comparador. En el canal inferior del osciloscopio, la referencia fija, mientras que en el superior se encuentran los impulsos FG corregidos en forma.
Nótese la respuesta del sistema, cómo a cada intento de perturbación del funcionamiento, éste recupera la funcionalidad marcada, con una exactitud sorprendente.
Hablemos del Filtro Pasabajos
Inevitablemente, como todo sistema de lazo cerrado, éste posee un eslabón crítico y le corresponde al filtro pasabajos.
Lamentablemente, es bastante complejo encontrar información precisa y certera acerca de los IC utilizados en éstos motores; por lo que se dificulta para cualquier diseñador, al faltar información, calcular correctamente el filtro pasabajos que variará de un motor a otro, debido a que no todos los motores existentes, utilizan el mismo IC.
Debido a los distintos fabricantes, varían los criterios empleados en las características y parámetros eléctricos empleados en la construcción de dichos IC, por lo que de unos a otros, variarán los valores requeridos de corriente y tensión de funcionamiento, para la entrada CV, ó Control de Velocidad.
En nuestro caso, hemos reformado en función de la práctica, un circuito utilizado en un sistema de control de frecuencia de un transmisor de FM comercial.
Originariamente, el filtro pasabajos adoptado, no le daba al sistema, el “enclave” justo, sino que la velocidad final del motor quedaba oscilando alrededor del valor correcto, pero nunca se detenía y enganchaba en fase con la referencia.
Algunas variaciones leves de los valores de los componentes, nos fueron acercando cada vez más a la situación ideal, hasta al fin lograrlo, tal como se puede notar en el video.
Por lo tanto, queda claro entonces, que los valores utilizados en nuestro ejemplo, difícilmente coincidan con los que pueda necesitar el motor que Uds. adopten, pero al menos tendrán un punto de partida, con el esquema dado, con el modelo presentado; que no significa que sea el mejor ó el más adecuado, sino que es uno de los tantos posibles diseños existentes y que a nosotros nos ha dado resultado con el motor empleado.
Uds. deberán ajustar en más o en menos los valores de los resistores y capacitores con generosa paciencia, hasta lograr ver en el osciloscopio, la maravilla del enganche de fase.
Tal vez en el mejor de los casos, encuentren otro diseño que presente mejores prestaciones funcionales; que dicho de otro modo, aquí es donde cada uno puede dejar su toque especial al sistema, dando rienda suelta al conocimiento y la creatividad.
Cómo identificar las conexiones del motor DRUM
Lo primero e inmediato que identificaremos serán los bobinados encargados de proporcionarnos los pulsos PG y FG.
El bobinado impreso en la placa, con formato de espiras “cuadradas”, ubicado del lado del entrehierro del “estator”, rodeando al mismo, será quien nos suministre los impulsos FG, fundamentales para el control exacto de la velocidad de giro de nuestro motor a través del sistema de lazo enganchado en fase (PLL).
Los impulsos PG, los obtendremos de distintas formas posibles de acuerdo al diseño del motor.
Habrá veces que notaremos un Sensor o Switch Hall en la parte inferior, quién recibirá inducción de parte de un pequeño imán móvil, solidario a la tapa inferior del motor.
Otras veces, será una pequeña bobina ubicada del lado interior del entrehierro del estator, o también posicionada del lado externo.
De todas formas, al igual que la otra bobina, será muy sencillo identificarla y no confundirlas entre sí.
Otra conexión sencilla de encontrar es la de Control de Velocidad. La misma siempre se encuentra sola, conectada en forma directa a algún pin del IC, sin tener más conexión.
Nos queda la alimentación de +12 Volts la que identificaremos observando que la misma lleva, a través de resistencias SMD, alimentación a los Sensores Hall correspondientes a los bobinados del estator, los que se ubican de forma física, entre medio de éstos.
Naturalmente encontraremos que también conecta al IC, y posee muy cercano a él, un capacitor SMD de .1uF (color marrón).
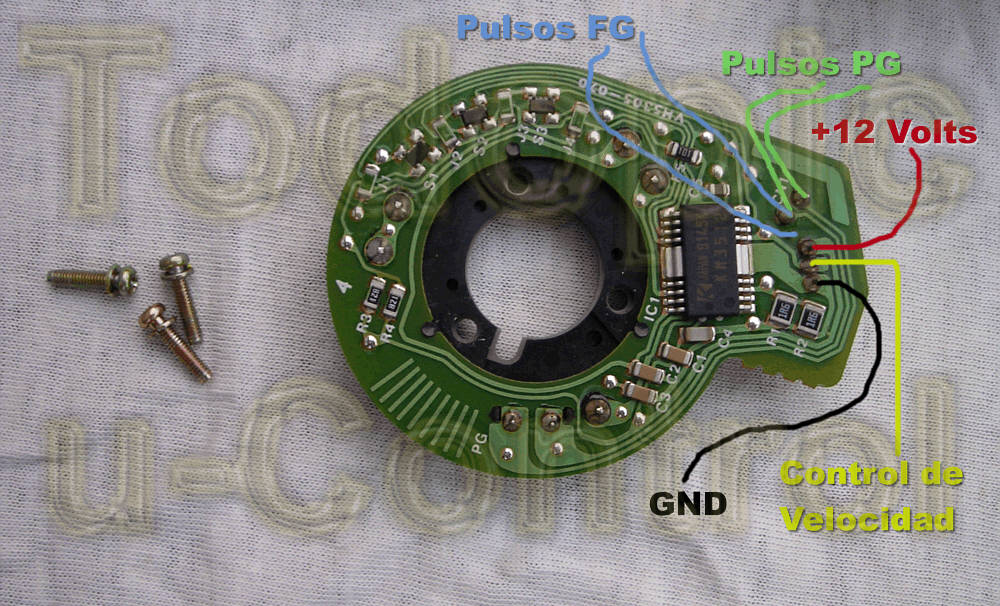
El que resta, lógicamente será GND.
Usualmente encontraremos las siete conexiones mencionadas al motor. Otras veces serán menos cantidad, pero siempre con la misma cantidad de funcionalidades que repetimos:
- Alimentación - +12 Volts
- GND
- Control de Velocidad
- Pulsos PG
- Pulsos FG
Y los PULSOS PG ?
Hasta aquí hemos hablado solamente de los Pulsos FG y en ningún momento le hemos asignado uso alguno a los Pulsos PG que esta hermosa joya mecánica puede brindarnos.
Los Pulsos PG cómo ya habíamos visto, nos entregarán la información de las RPM que alcance nuestro sistema y además nos brindarán la posibilidad de darnos la vital lectura de la Posición Angular del rotor.
Una vez que hayamos identificado el componente Hall o la bobina captora en la placa de control del motor, nos daremos cuenta, donde se halla el imán que inducirá en él/ella, el Pulso PG y que se encuentra en la tapa inferior del motor, en la parte móvil del mismo.
Luego también encontraremos que la posición angular de activación, puede ser alterada si giramos la pieza de bronce solidaria al eje, donde se atornilla la tapa inferior del motor y que posee el imán inductor.
La próxima etapa del desarrollo del Proyecto MOTOR DRUM, será transmitir ésta información angular, disponible en el estator del motor, hacia la parte móvil del mismo, donde se utilizarán para dar un “punto de inicio o referencia” respecto al medio; hacia el microcontrolador, para que éste sepa el momento exacto del giro en que se halla ubicado.
El medio que pensamos utilizar para dicha transferencia es el transformador móvil que se encuentra en cada motor debajo de lo que conocemos cómo “Tambor Portacabezas” ó “Cabezal”. Recordemos que éste transformador móvil, es el encargado de llevar desde la cinta o hacia ella, la información de la imagen que vemos al reproducir un VHS, por lo que es capaz de transferir señales de alta frecuencia.
Dicho esto, resta lograr además por el mismo medio, la transferencia de la energía suficiente para activar los sistemas que se ubicarán en la parte móvil, tarea que no será nada sencilla, pero que intentaremos obtener con éxito.
La idea básica es transferir una señal de amplitud constante de varios Kilo-Hertz, con los Pulsos PG modulados en frecuencia sobre dicha portadora.
La rectificación y aprovechamiento de la energía de la portadora fundamental se utilizaría como alimentación al sistema, mientras que un sencillo demodulador de FM o FSK, recuperaría de ésta los Pulsos PG, para sincronizar el mensaje con la posición angular de la parte móvil. Pero eso será en la segunda etapa.
Esperamos que todo haya sido sencillo de comprender y que los resultados que logren, sean los mejores.
Éste artículo, también puede ser descargado desde AQUÍ en formato PDF. Cualquier duda o consulta que pudiera surgir del texto expuesto, será atendida por Mail
| Lo que estás buscando puede estar dentro del Tutorial de Televisión y no hemos sabido ponerlo fácilmente accesible a tí. Para encontrarlo, utiliza el buscador de la Izquierda. Escribe la palabra que resuma tu búsqueda y luego pulsa la tecla ENTER |
Foro de Consultas |
Mercado del Usado |
Radioaficionados |
Tutorial
de TV |
Tutorial
de Audio |
TV Digital |
Doppler |
Satélites |
Datasheets
|
Radio Digital |
Revistas
DVD |
Dr. Alicate |
Links