
Multi-touch Touchscreen (Pantallas tactiles)
Las pantallas multitáctiles están haciendo furor en la mayoría de las aplicaciones de consumo masivo actuales. Los teléfonos móviles y ordenadores se encuentran al tope de la lista de dispositivos que utilizan esta tecnología que no deja de avanzar. El futuro será sin pulsadores mecánicos y la interfaz hombre-máquina ya no será texto o número. Sólo habrá simbología específica y frases hechas. Y allí estarán los sensores táctiles, confiables y durables. No se puede pretender más. Entérate cómo es la tecnología de transferencia de carga, la resolución de los sensores, la selectividad, el problema del ruido y la mayoría de los inconvenientes que deben sortearse para obtener un funcionamiento óptimo en la interfaz del futuro que ya está aquí.


Las grandes pantallas táctiles basadas en sensores capacitivos están ganando el mercado de los teléfonos móviles donde interactúan en forma directa con las aplicaciones que ofrecen en imagen y con el usuario. Capaces de detectar una suave pulsación hasta la acción de arrastrar un dedo por su superficie, estos sensores se transformaron en el corazón de la mayoría de estos dispositivos. Ellos “sienten y son sensibles” al medio ambiente y al comportamiento del usuario, permitiendo que el producto que se está utilizando responda de manera intuitiva y a la vez segura. Sin embargo, las películas del sensor en sí no son inteligentes. No son capaces de diferenciar entre lo que es un dato útil, un error o discriminar entre las distintas opciones que el menú ofrece en pantalla.

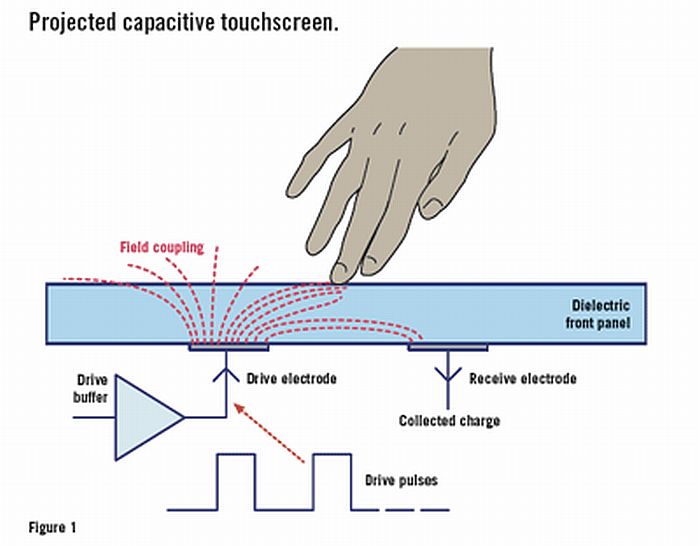
La proximidad de un objeto, provoca la alteración del campo dentro del dieléctrico

El Tutorial de Televisión que ha ayudado a miles de técnicos de toda América a aprender cada día más del oficio

Aprendé a reparar DVD, cambiar su pantalla de inicio, reparar su firmware y a conocer más de ésta nueva unidad multimedia del hogar
Lo que en la realidad física realizan es proyectar un campo eléctrico a
través de un material dieléctrico y recibir “el eco” devuelto por
nuestros dedos, gracias a un chip inteligente de detección capacitiva.
Este tipo de sensores son conocidos como tecnología de capacidad
proyectada y están siendo utilizados en la mayoría de los modernos
diseños de soluciones de pantallas táctiles o touchscreen. Por supuesto
que no estamos diciendo que no sean complejos en su construcción. Por el
contrario, un sensor de pantalla táctil capacitiva consta de una gran
variedad de materiales tales como óxido de estaño e indio (Indium Tin
Oxide, ITO), conductores en una o más capas de vidrio y plásticos como
el tereftalato de polietileno (Polyethylene Terephthalate, PET), entre
otros elementos.
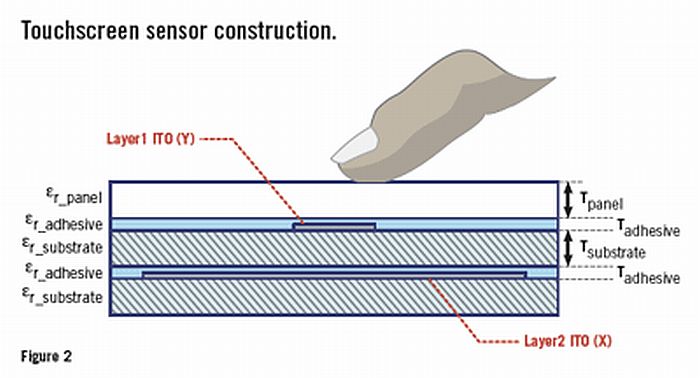
Vista transversal de las capas que componen un sensor moderno

La buena claridad óptica y la baja resistividad de los materiales
empleados en las diferentes capas (ITO) hacen posible la realización de
una pantalla táctil de alta performance. Cuando estas capas están
conectadas al chip que las opera y se encuentran en un ambiente donde
existe una aceptable relación señal/ruido (SNR), es posible detectar
cambios mínimos de capacidad con absoluta precisión. La presencia de un
dedo, por ejemplo, provoca una alteración de capacidad en la zona de un
picoFaradio (1pF). Sin embargo, lograr hacer realidad un entorno donde
exista una SNR aceptable es muy complicado ya que siempre se estará
trabajando en un hábitat donde existirán capacidades parásitas de varios
nanoFaradios (nF) que cambian constantemente según la manipulación y el
funcionamiento del dispositivo.
La tecnología de transferencia de carga permite operar en ámbitos
adversos con excelente SNR y es capaz de detectar la aproximación mínima
de un dedo a la pantalla. A tal punto esto es así que permite la
detección del toque con sólo apoyar la uña sobre la superficie. Esta
técnica basa su funcionamiento en un sencillo grupo de finos electrodos
sensores para cada canal capacitivo. Uno de ellos es encargado de
transmitir un tren de impulsos lógicos en forma de ráfaga (burst). El
electrodo receptor, por su parte, se acopla al transmisor a través del
panel dieléctrico que los separa. Cuando un dedo toca el panel, el
acoplamiento del campo eléctrico entre emisor y receptor se favorece y
el tacto se detecta.
La mayoría de los sistemas de adquisición de señales de carga dejan las
líneas “en caliente” (sensibles al tacto) durante el proceso de
conversión de la señal, por lo que pequeñas corrientes parásitas dentro
del sensor pueden ser incluidas como parte del cálculo de la posición de
toque, introduciendo de este modo inexactitudes en la medición de la
posición real. La posición del cableado y el largo de los conductores
desde la pantalla sensible hasta el chip de proceso de la información se
convierte en un problema serio cuando la distancia supera apenas unos
pocos centímetros.
La técnica de transferencia de carga mantiene en forma constante a todas
las líneas receptoras a un potencial cero restringiendo sólo la
adquisición de datos a los puntos donde se detecta el toque. De esta
forma, resuelve el problema de errores en la medición. La técnica
utilizada es la activación secuencial de las pequeñas rayas resistivas
que forman toda la zona útil del sensor. De esta manera, se realiza un
barrido constante y se puede detectar en forma segura un toque. Al
momento de apoyar el dedo sobre la pantalla, se produce la adquisición
de cargas de esa zona específica mientras el sistema anula todas las
demás filas y columnas (X e Y) vecinas al sector detectado, aislando la
zona por completo. Es decir, a los bordes del punto tocado, los
electrodos estarán deshabilitados para prevenir errores de medición y
proporcionar una alta relación señal/ruido.
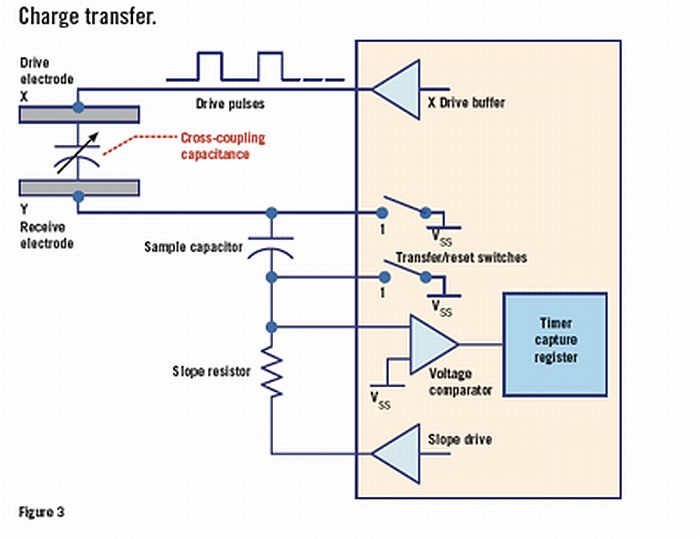
El sistema de transferencia de carga, pone a potencial cero los sensores y efectúa la conversión sobre el almacenamiento del dato obtenido

Capacidad Mutua Vs. Capacidad Propia
Estos son los dos enfoques principales que podrían determinar la
posición de los dedos en una pantalla táctil de capacidad proyectada.
Por un lado, la capacidad propia funciona bien para sistemas de un solo
toque. Pero con sistemas de “toque múltiple” no hay manera de resolver
la ambigüedad de posición reflejada en los resultados de más de un
contacto simultáneo en diferentes partes de la pantalla.
Por ejemplo, si el usuario toca en una grilla capacitiva determinados
lugares (X1, Y1) y (X2, Y2), la información entregada simplemente le
dirá al chip que las líneas X1, X2, Y1 e Y2 han sido tocadas sin tener
un verdadero conocimiento de la combinación real entre los puntos
activados. Podría ser que el chip interprete los grupos (X1, Y2) y (X2,
Y1) como los sitios alcanzados por el tacto. Este problema se conoce
como el “efecto fantasma”.
En cambio, la medición de capacidad mutua utiliza una matriz ortogonal
de electrodos transmisores y receptores dispuestos en una organización
de múltiples nodos de contacto más pequeños creados por la geometría de
la estructura de los electrodos. En un sistema basado en capacidad
mutua, cada toque es único y detectado como un par de coordenadas X-Y,
mientras que en un sistema de capacidad propia, la detección del toque
entrega coordenadas X e Y independientes. Además, si dos toques están
presentes en un sistema de capacidad mutua, esto sería detectado como
(X1, Y1) y (X2, Y2), mientras que en un sistema de capacidad propia este
evento sería detectado como (X1, X2, Y1, Y2), dejando dos posibles
combinaciones de coordenadas. El efecto fantasma en la capacidad propia
es exponencial y se vuelve imposible de resolver a medida que vamos
avanzando hacia tres o más toques. Debido a que el acoplamiento
capacitivo formado dentro de un arreglo puede ser medido en forma
independiente, podemos decir que no existirá confusión en las
coordenadas reportadas por múltiples toques. Por este motivo es
técnicamente posible el reconocimiento de ilimitados toques en la
pantalla.
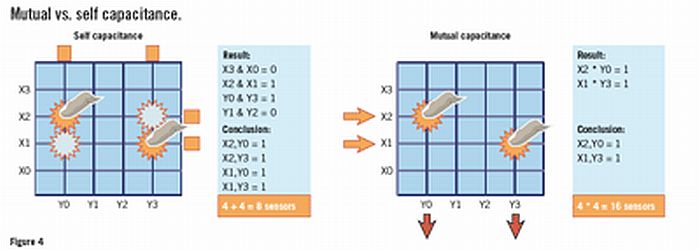
El efecto fantasma en las grillas de capacidad propia
|
Más Artículos Contador LED Monitor Cardíaco Robot Siguelíneas Servomotores Dip - Meter Láser EEPROM 24CXX |
Los sistemas de adquisición de datos a través de los sistemas de
transferencia de carga, junto con la implementación de la técnica de
capacidad mutua, ofrecen una relación señal/ruido superior y una mejor
tolerancia a las capacidades parásitas, permitiendo que las señales
débiles, como la capacidad inducida a través de una uña, la moneda o el
stylus, puedan ser procesadas y correctamente interpretadas.
Resolución del sensor
Cuando hablamos de resolución nos referimos a la capacidad que tendrá la
pantalla de detectar el elemento más pequeño posible. Esto estará
directamente relacionado con el diseño de las tramas de electrodos ITO
colocados sobre la superficie. Un patrón de alta resolución estará
formado por una gran cantidad de líneas verticales (transmisoras)
separadas por un dieléctrico a una segunda capa que contiene una matriz
horizontal de líneas (receptoras). A mayor cantidad posible de líneas
involucradas, mayor resolución. En cada punto de cruce entre líneas
horizontales y verticales se formará un punto de capacidad detectable
por el procesador del sistema. A pesar de que el proceso de fabricación
se vuelve más complejo, siempre será más provechoso sumar la mayor
cantidad que se pueda de líneas en la pantalla para mejorar la
resolución y la relación señal/ruido.
La distancia que puede considerarse mínima de separación entre líneas de
electrodos es de aproximadamente 5 milímetros o algo menos. Esto
significa que una pantalla de 4,3 pulgadas, en una proporción de aspecto
de 16:9, idealmente debiera tener aproximadamente 19 filas por 11
columnas, es decir, un total mínimo de 209 intersecciones individuales
de capacidad mutua. Por supuesto que incrementando la densidad de
electrodos podemos lograr una mejor calidad de interpretación de los
datos capturados que permitiría seguir una continuidad de movimiento en
el toque realizando así dibujos o firmas que puedan ser reconocidas de
manera eficaz por el sensor táctil.




La gran resolución de los sensores permite dibujar o escribir sobre las pantallas
Con una tasa de refresco suficientemente alta (200 Hz.), la tecnología
puede incluso permitir una firma a velocidad completa y el
reconocimiento de una escritura con un lápiz de tan solo 2 milímetros de
diámetro. Al incrementar demasiado la resolución, se choca de manera
inevitable con un nuevo inconveniente: la selectividad de los datos que
son introducidos por toque, sean estos voluntarios o no. El reto
consiste en recopilar los datos, descartar los inútiles y utilizar los
datos útiles de una manera selectiva y precisa. La introducción de la
selectividad y precisión consiste en organizar y medir el cambio en la
capacidad de una manera significativa, al tiempo que se obtiene una
adquisición de datos suficientes y la aplicación de algoritmos adecuados
para permitir una diferenciación cualitativa.
La necesidad de un sistema de detección de toques múltiples.
Dos simples toques (realizados por los dedos del usuario) permiten en
una pantalla que un objeto pueda ser activado, estirado, achicado y
girado. Entonces, uno puede preguntarse acerca de la real necesidad y
utilidad de procesar 5 o 10 toques simultáneos cuando apenas caben tres
dedos en la pantalla de un teléfono móvil. La realidad, sin embargo, nos
indica la necesidad de hacer sistemas táctiles más selectivos de las
informaciones deseadas por sobre las accidentales o fortuitas. De esta
forma, los trazos o toques útiles serán procesados correctamente
mientras que el procesador desechará las acciones identificadas como no
válidas.
Una pantalla capacitiva táctil por sí sola no tiene noción de lo que
está tocando, de quién o qué la está tocando y por qué. No puede
distinguir entre un dedo, la oreja, la cara, el codo o una mariposa. Por
lo tanto, es muy posible emitir comandos accidentales con sólo asir el
teléfono por los bordes o al apoyarlo contra el oído o la cara para
poder comunicarse.
De este modo, se buscan procesadores capaces de determinar en forma
correcta e inequívoca los falsos toques que pueden producirse en forma
accidental. Un avance hacia la detección de formas geométricas o
dimensionales puede ser el camino para detectar que los sensores pueden
deshabilitarse parcialmente en la zona de la cara o la oreja al hablar
por teléfono. Para que esto sea posible, la densidad de líneas que
formen la mayor cantidad de capacidades mutuas como sea posible es un
factor primordial.

Una aplicación con un contador ascendente / descendente que puedes utilizar en cualquier proyecto.
Una mayor densidad de electrodos permite la activación de zonas cada vez más pequeñas

Con el monitor cardíaco que te presentamos puedes controlar, escuchar y ver tu ritmo cardíaco.

Será el sucesor del DVD? Aprenda a conocerlo.
El problema del ruido
Como dijimos antes, los circuitos que procesan la información capturada
a partir de cambios muy pequeños en la capacidad de un punto de cruce
entre una línea y una columna están obligados a tener un alto rechazo al
ruido externo e interno que acechan al sistema para poder operar de
manera correcta. A esto se le llama, como también se dijo antes,
relación señal/ruido (SNR).
El ruido proviene de todas las direcciones imaginables y se presenta
sobre el dispositivo (en primera instancia) desde el propio display del
equipo que muestra la imagen sobre la cual vamos a trabajar. A menudo,
los LCD provocan transitorios de tensión de varios voltios con tiempos
de subida y caída mesurables en microsegundos. Gracias a las técnicas de
conversión de las capacidades medidas en valores digitales y a los
algoritmos de supresión de ruidos, es posible rechazar la mayor parte
del ruido que acecha a nuestro equipo.
Otro fenómeno que se presenta es al utilizar una fuente de alimentación
conectada a la red domiciliaria al momento de operar una pantalla
táctil. Los ruidos presentes en la red y una tensión flotante y
permanente inducida desde la fuente se enfrentarán a nuestros dedos que
descargarán esa tensión alterna deformada de 50 o 60 Hz. dando lugar a
tremendas colisiones eléctricas que pueden parecernos inexistentes. Pero
debemos tener siempre en cuenta que no lo es para el sensor que basa su
funcionamiento en la variación de pequeñas capacidades equivalentes a
pocos picoFaradios.

La interfaz del futuro será táctil
Conclusión
La evolución hacia pantallas integradas con matrices más densas de
sensores transmisores y receptores que utilicen el método de
transferencia de carga es el futuro inmediato en el mundo de las
pantallas multi-táctiles. La sofisticación y evolución necesaria en el
diseño de procesadores capaces de individualizar, categorizar y
seleccionar entre instrucciones válidas o no, es la segunda meta a
alcanzar en la evolución hacia el dominio total de los sensores
capacitivos táctiles por sobre cualquier otro tipo de interfaz entre la
máquina y el usuario. Tal vez hoy no podamos imaginar los alcances de
uso que pueda tener esta tecnología. El tiempo dará la respuesta y tú
estarás allí para comprobarlo.
|
Importante: Si lo que encuentras aquí te resulta útil, ayúdanos a mantener este sitio. Cualquier donación es bienvenida. Tu apoyo nos permitirá acceder a nuevos materiales y a montajes más interesantes y útiles. Gracias por ayudarnos a hacer Servisystem cada día mejor. Tu ayuda será muy importante para nosotros. Gracias. |