

Estos dispositivos son considerados una de las materias primas en el diseño y la construcción de los robots. Si combinamos y administramos los movimientos en un montaje mecánico adecuado, un grupo variable de servomotores puede dar motricidad y locomoción a sistemas controlados de manera local o remota. Desde pequeñas aplicaciones didácticas hasta el más complejo diseño robótico. Los límites son tu imaginación y tus ganas de aprender.Dadme un punto de apoyo y moveré al mundo” habría dicho Arquímedes de Siracusa, arrastrado quizá por un entusiasmo desmedido ante su descubrimiento de la ley de la palanca. A partir de allí comienza la historia de las máquinas simples, y el dispositivo que veremos y aplicaremos hoy en este artículo es un buen ejemplo de ello.
Un servomotor es básicamente un actuador mecánico basado en un motor y un conjunto de engranajes que permiten multiplicar el torque del sistema final, el cual posee elementos de control para monitorear de manera constante la posición de un elemento mecánico que será el enlace con el mundo exterior. Es decir, ante una acción inducida electrónicamente a un servomotor, obtendremos por resultado una respuesta mecánica controlada. Por ejemplo, los motores que forman parte de una impresora, junto a los sistemas de control de avance o retroceso del papel, forman un servomotor.


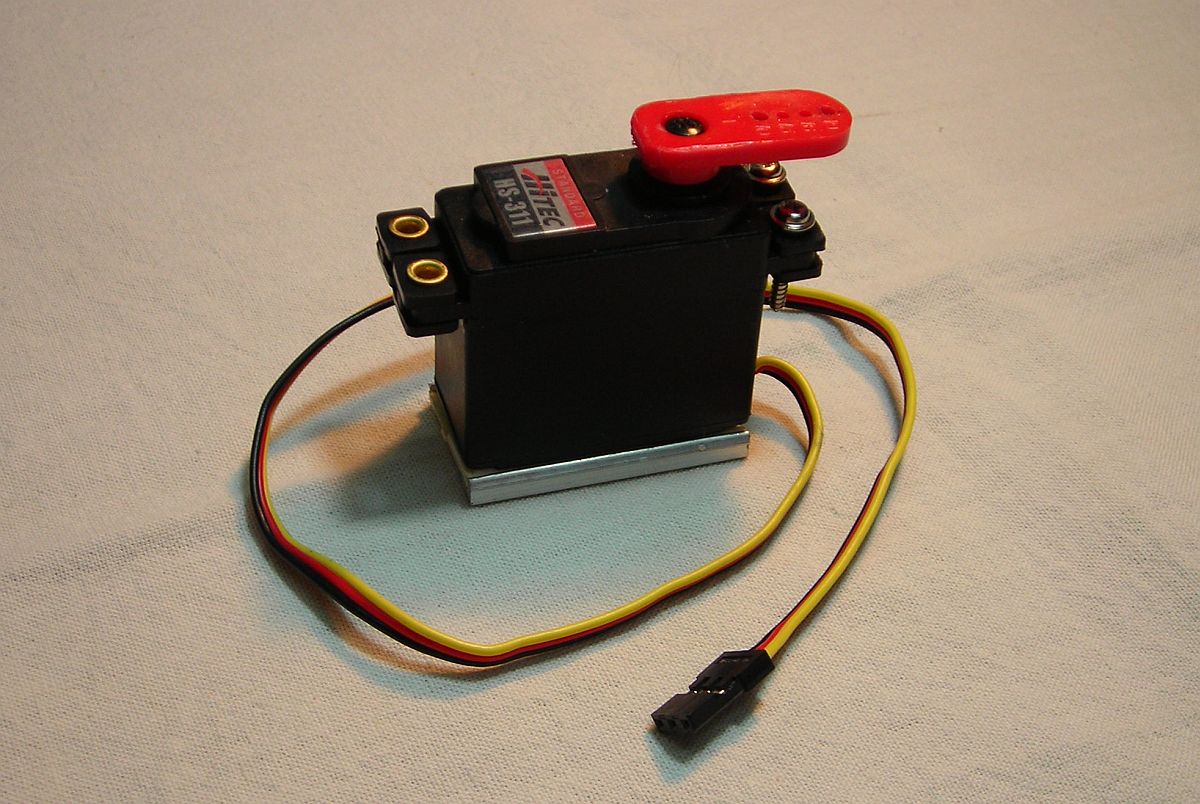
Un clásico servomotor de reconocida
marca y para aplicaciones sencillas
Las aplicaciones de
estos sistemas esclavos se pueden observar mayormente en aeromodelismo y
robótica, pero no son exclusivos de estos usos. Cualquier sistema que
requiera un posicionamiento mecánico preciso y controlado dependerá de
un servosistema o servomecanismo, actuado, por supuesto, por un
servomotor. El zoom de una cámara, el autoenfoque de un conjunto óptico,
un sistema de movilización de cámaras de vigilancia y hasta las puertas
automáticas de un ascensor son sencillos ejemplos de su aplicación.
El motor posee la característica de girar a una buena velocidad, la cual
disminuye por los juegos de engranajes de la caja reductora que
aprovechan esta velocidad para transformarla en fuerza de trabajo. Al
girar el último engranaje acoplado al eje de salida obtenemos una
velocidad notablemente reducida, a pesar de que, dentro del sistema, el
motor está girando a altas velocidades.

Diagrama en bloques de la estructura interna de un servomotor

Además, en esta última
rueda de acoplamiento encontraremos topes o límites de recorrido para
entregarnos en la salida final un giro de 180° del brazo actuador. En la
mayoría de los servomotores, este desplazamiento angular es “copiado”
por un potenciómetro incorporado al sistema de control y solidario en
forma mecánica al eje externo. Este sensor resistivo se encargará de
informarle al sistema la posición que posee el actuador exterior para
así controlar con exactitud que la instrucción de posicionamiento
enviada esté siendo ejecutada fielmente.
Conectando un servo
Las conexiones son muy sencillas y se basan en una normativa de colores
muy elementales que involucran al Rojo como positivo de la alimentación
principal, junto a otro cable que puede ser de color Negro o Marrón y
que, por lógica, podemos deducir que se trata del negativo de
alimentación. Un tercer cable, correspondiente al control de
posicionamiento del actuador mecánico, es Amarillo o Blanco. En la
primera imagen se puede apreciar el conjunto de colores Rojo – Negro y
Amarillo para la conexión en servomotores de la marca HITEC.
La tensión de trabajo de los servomotores suele estar comprendida entre
los 3 y los 7 Volts, siendo 5 Volts la tensión que se utiliza en la
mayoría de las aplicaciones fijas donde interviene una fuente de
alimentación conectada a la red de energía domiciliaria, y 6 Volts para
los casos de alimentación a baterías cuando se trata de equipos móviles.
En todos los casos, siempre se requiere de una señal de control de 5
Volts de amplitud.
La señal de control del servo
Como mencionamos al principio, los servomotores se controlan mediante
impulsos de ancho variable que deben refrescarse periódicamente. Esto
significa que si dejamos de enviar la señal de control en el tiempo en
el que el servomotor lo necesita, éste (a pesar de estar energizado)
dejará de mantenerse en la posición preestablecida y adoptará cualquier
orientación regida por el esfuerzo al que esté sometido. Es decir, si no
mantenemos la señal de control en forma efectiva todo el tiempo que sea
necesario, el sistema quedará a merced de las fuerzas externas a la que
sea sometido. Por ejemplo, un brazo de palanca dejará de sostener un
objeto y se dejará caer todo el trayecto mecánico que pueda recorrer, o
un sistema erguido en vertical se caerá hacia atrás o hacia adelante al
momento en el que el servomotor deje de “sostener” la aplicación en la
posición preestablecida.
Para bloquear al servomotor en una
posición es necesario, entonces, enviarle continuamente la señal con la
posición deseada. De esta forma, el sistema de control seguirá operando
y el servo conservará su posición y se resistirá a las fuerzas externas
que intenten cambiarlo de posición.


Tiempos de duración de los impulsos y dirección obtenida del actuador

El refresco se realiza
habitualmente con una frecuencia de 50 veces por segundo, pero es normal
y efectivo trabajar entre los 10 y los 30 milisegundos, tal como muestra
el diagrama. Por otro lado, el ancho del impulso, es decir, su tiempo de
duración, dará la posición u orientación del actuador mecánico. En este
punto en particular, es decir, cuando se está constantemente atento a
enviar un impulso de duración exacta para evitar oscilaciones mecánicas
indeseadas, se centra la complejidad y la cautela al trabajar con
servomotores.
Si para el control de uno de estos sistemas utilizamos un
microcontrolador que además de actuar sobre el servomotor deba realizar
otras actividades, se nos planteará siempre el temor de no lograr actuar
en los tiempos requeridos por estos sistemas. Sin embargo, la clave de
un funcionamiento satisfactorio y de una realización sin mayores
complicaciones se basa en la utilización de un cristal de alta
frecuencia (20 Mhz) para poder ejecutar todo el trabajo adicional que
sea necesario hasta que llegue el momento de refrescar nuevamente el
impulso de control del servomotor. Esto debe ir acompañado, por
supuesto, de la observación cuidadosa del diagrama de tiempos de nuestra
aplicación.
|
Importante: Si lo que encuentras aquí te resulta útil, ayúdanos a mantener este sitio. Cualquier donación es bienvenida. Tu apoyo nos permitirá acceder a nuevos materiales y a montajes más interesantes y útiles. Gracias por ayudarnos a hacer Servisystem cada día mejor. Tu ayuda será muy importante para nosotros. Gracias. |