

¿Necesitas salir de casa y no sabes si lloverá o habrá sol? ¿Tienes temor de salir sin abrigo y pasar una noche con mucho frío? Aprende a conocer el clima, a dominar el estado del tiempo, sin necesidad de esperar las noticias. Con la aplicación que comenzamos a desarrollar hoy, y sin llegar a pretender una estación meteorológica profesional, podremos estudiar diversas variables que pueden resultar muy útiles: temperatura, humedad, dirección y velocidad del viento, todo lo que necesitas saber antes de salir de casa. ¿Tienes una red RS485 montada? Aquí tienes un terminal que nada tiene que envidiarle al servicio meteorológico local.El desarrollo que comenzaremos a mostrarte hoy está formado por 4 partes bien definidas que cumplen funciones muy importantes.
Construida con materiales muy
fáciles de conseguir, esta mini-estación meteorológica utiliza caños
plásticos de desagües pluviales, chapas de zinc, varillas roscadas,
caños de aluminio (utilizados para pequeños cortinados), algo de madera
y, por supuesto, algunos componentes electrónicos específicos, muy
populares por cierto. Demás está decir que en esta construcción, como en
todas las que acostumbramos a desarrollar en NeoTeo, se requiere de
prolijidad, esmero y muchas ganas de lograr un resultado exitoso. Los
instrumentos que formarán esta construcción son los siguientes:* Un anemómetro, encargado de medir la velocidad del viento.
.


Microcontroladores - PIC
No te pierdas este nuevo espacio donde hablamos de ... más Electrónica

* Un termómetro, capaz de lograr mediciones de temperatura entre -40 y
+125° C (-40 y +257° F)
* Un higrómetro, que nos proporcionará información sobre la humedad
ambiente (0–100% RH).
Sin duda alguna, son datos muy importantes para tener en cuenta antes de
salir de casa. Los valores de humedad y temperatura, en conjunto con los
datos del viento, pueden ayudarnos a estudiar de qué manera se comporta
el clima y los fenómenos que pueden provocar las diversas variaciones de
estas magnitudes que podrán ser medidas y estudiadas con este útil
desarrollo.


El sensor de temperatura y el higrómetro vienen encapsulados en un mismo chip que pertenece a la familia SHT1x de la firma Sensirion. Estos sensores se presentan en una pequeña placa donde se encuentran integrados, construidos y calibrados para proporcionar una salida digital totalmente libre de ajustes y posibilidades de errores de calibración. Este dispositivo incluye un elemento sensor de polímero capacitivo para la medición de humedad ambiente y un sensor de tecnología “bandgap” para la medición de temperatura. Ambos elementos de medición están conectados a un convertidor analógico digital de 14 bits y a un circuito de interface serie contenidos dentro del mismo chip.

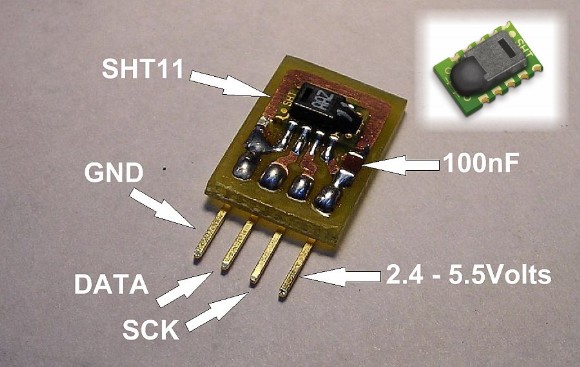
El módulo SHT11 instalado en una placa que facilita su manejo
Con esto, se obtienen mediciones rápidas, de gran calidad e inmunes a las perturbaciones externas. Cada sensor SHT11 es calibrado de forma individual durante su fabricación, utilizando un higrómetro de alta precisión como referencia para obtener una serie de coeficientes de calibración que son grabados en una memoria OTP y utilizados durante la medición con el fin de calibrar la señal de salida del módulo. El circuito posee una interfaz de sólo dos cables, muy adecuada para su utilización en sistemas basados en microcontroladores, como será nuestro caso. Su tamaño muy reducido y su bajo consumo de energía lo convierten en una excelente elección para sus aplicaciones (80uW). Si no lo consigues en las tiendas de materiales de tu región, recuerda que Sensirion hace envíos de muestras gratis de este sensor a todo el mundo. Sólo debes ingresar a su Web (enlace ubicado al final del artículo) y solicitar una muestra para ensayos particulares.

Conexión recomendada por el fabricante en su hoja de datos
Al final de la construcción del sistema, las variables de temperatura y humedad podrán ser visualizadas en gráficos dentro de una aplicación que funcionará en el ordenador y que nos permitirá ver su evolución y variación durante intervalos de tiempo predeterminados. Por tratarse de una obligatoria red RS485, las conexiones terminarán en la placa convertidora RS485–RS232 que ya hemos visto el año pasado y que puedes encontrar en este enlace. Por lógica, el sistema podrá conectarse únicamente a ordenadores que posean un puerto serie. El próximo paso será implementar una comunicación inalámbrica desde la estación meteorológica hasta un dispositivo capaz de recibir los datos e ingresarlos al ordenador mediante una conexión USB. Esto permitirá la posibilidad de utilizar cualquier ordenador móvil y ampliará los horizontes de aplicación de la estación a trabajos en unidades portátiles y fáciles de trasladar.



El microcontrolador
empleado en el desarrollo será el PIC16F873A que nos permitirá conectar
todas las partes necesarias que formarán la estación, esto es, un driver
SN75176 para la conexión al bus RS485, un puerto entero dedicado a la
medición de la dirección que posea el viento, y una entrada para un
amplificador operacional LM358 que se encargará de procesar la
información necesaria para obtener la medición de la velocidad del
viento. Para este fin, al igual que para determinar la dirección del
viento con la veleta, utilizaremos un par de motores Drum que ya no se
utilicen de las antiguas máquinas de vídeo VHS. No necesitamos motores
que funcionen o sistemas que estén operativos en su totalidad. Nuestra
única meta será aprovechar los sistemas mecánicos que estos dispositivos
poseen.
El eje del motor viene soportado por dos rodamientos de alta calidad y
de gran suavidad en su deslizamiento. Esto será muy útil e importante al
momento de la construcción mecánica del anemómetro. Cualquier otro
sistema que se nos ocurra utilizar, habría que salir a buscarlo,
comprarlo, mandarlo a fabricar a medida, inventarlo o soñar con
encontrarlo en casas especializadas en el tema y pagar por ellos precios
escalofriantes. Sin buscar demasiado, los elementos se encuentran allí
en el desván, en el altillo o en el estante de los cacharros que ya no
utilizamos y que aún no entendemos por qué no los hemos arrojado a los
residuos. Y si no encuentras ninguno disponible en tu hogar, muchos
servicios técnicos estarán agradecidos de que les quites algo de rezagos
que sólo sirven para ocupar espacio inútil y juntar tierra. Si aún no
has pillado cuál es el motor del que hablamos, observa este video y
descubre qué es lo que necesitas:

tener siempre a mano un sistema de iluminación de emergencia.


Midiendo diodos y transistores
Una vez que tengas en tu poder un par de estas maravillas mecánicas, comenzarás la construcción física de la veleta o del anemómetro, según tu preferencia o disponibilidad de materiales. Para el caso del anemómetro, debes identificar el sensor de efecto Hall que señalamos en el video que te permitirá obtener los impulsos para lograr la medición de la velocidad del viento. Si en cambio deseas comenzar con la veleta, es decir, con el indicador de dirección del viento, puedes desarmar la parte inferior del motor, retirar la placa que contiene las bobinas motrices y el resto de los circuitos que hacen funcionar al motor. Como dijimos antes, aquí no necesitarás el motor en funcionamiento sino aprovechar sus magníficas cualidades mecánicas.
/Imagenes/Cabecera.jpg)
crear una pequeña matriz de LEDs

una fuente de alimentación múltiple que se pueda incrustar en cualquier punto del protoboard
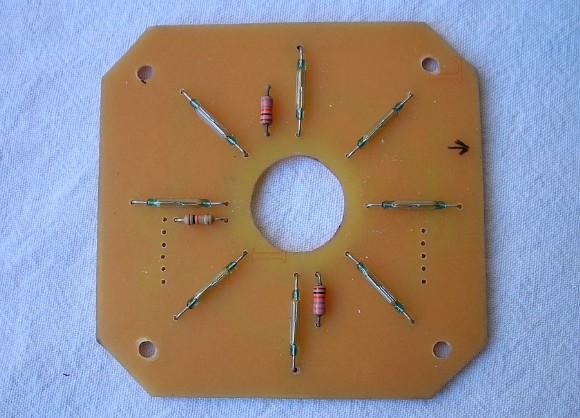
Montaje en estrella de los 8 Reed Switch empleados en la veleta

sencilla matriz de LEDs de al menos 8 LEDs por otros 8 LEDs (ancho por alto).
Para aquellos que no los conozcan, los Reed Switches son pequeñas ampollas de vidrio que poseen delgadas láminas de metal capaces de deformarse al ser sometidas a un campo magnético. Por lo general, poseen dos terminales a los extremos y su contacto interior es normal abierto. ¡Cuidado! Los Reed Switches son muy frágiles y si intentas doblar sus terminales cerca de la ampolla, terminarás rompiéndolos. Al acercarles un imán, las láminas se deforman y el contacto eléctrico se cierra. Aplicando un poco de lógica, hemos dispuesto 8 elementos de este tipo que nos indicarán los cuatro puntos cardinales (Norte, Sur, Este y Oeste), más otros cuatro puntos intermedios (Nor-Este, Nor-Oeste, Sur-Este y Sur-Oeste). Logrando el montaje apropiado de una pieza de imán, acoplada al eje móvil para que active los Reed Switches al pasar en sus proximidades, tendremos la información de cuál de los ocho interruptores se cierra y así conocer la dirección del viento. Aquí puedes ver una imagen explicativa con los elementos que intervienen en el montaje interior.

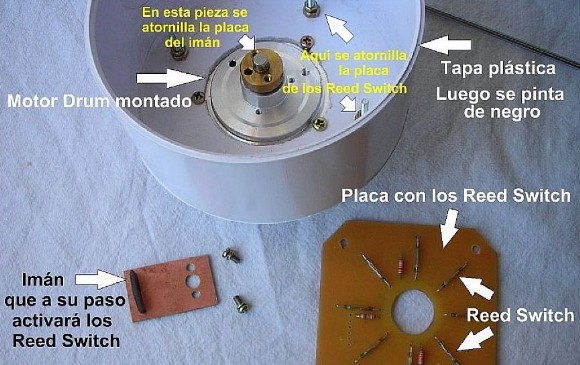
Detalle de los elementos utilizados
En esta parte del desarrollo, no tiene mucho sentido brindarte las medidas de las placas junto a sus circuitos impresos ya que todo dependerá del tamaño de los Reed Switches que consigas o puedas comprar. Lo importante, como siempre, será lograr la construcción robusta y firme de la placa y su anclaje a la tapa plástica que soportará el sistema. De acuerdo al tamaño de los bimetálicos, resultarán los tamaños del resto de la construcción.
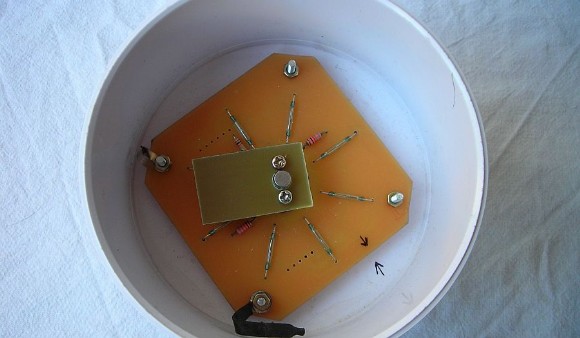
De este modo debe lucir la construcción finalizada en el lado inferior

El sistema armado y completo debe quedar como muestra la imagen superior. La distancia aconsejada de separación entre el imán y los Reed Switches no debe ser superior a unos 3 o 4 milímetros. Debes controlar muy bien esta situación mecánica ya que, de lo contrario, los contactos no cerrarán y no llegará la información adecuada al microcontrolador. En la fotografía superior también puedes ver un par de láminas, agarradas a las tuercas de fijación, que servirán para atar los cables que salgan de la placa y así evitar que se enreden con la pieza móvil que soporta el imán.


Primeros pasos en el montaje mecánico de la veleta
La parte superior del conjunto tendrá una tapa fabricada con chapa galvanizada (o zincada) que le servirá de protección al conjunto Motor-Tambor para protegerlo de la lluvia. Al sistema que te mostramos en la fotografía le falta aún un faldón protector mayor que se aprecia en el video de presentación. Una liviana varilla de aluminio servirá de punta de flecha para dar cuerpo y soportar al “timón de cola” que también estará construido de material galvanizado. Al girar de manera suave la veleta en un ambiente silencioso, escucharemos los contactos de los Reed Switches que se activan uno a uno a medida que la flecha apunta en todas la direcciones dentro de un giro de 360°. El ancho de la pieza de imán debe ser cortado de modo que no deje espacios vacíos con Reed Switches sin activar. Esto debe ser tenido muy en cuenta porque puede presentarse la situación incierta de que no tengamos ninguna información en el puerto en el momento de la medición, lo que resultaría en un dato erróneo y no deseado.
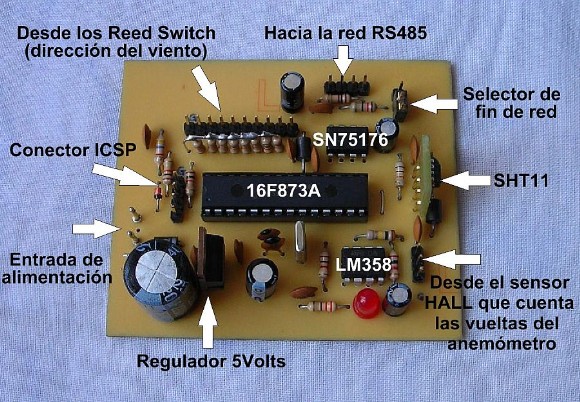
Placa final del desarrollo que construiremos en la próxima entrega

te brindaremos una idea para poder incrementar tu seguridad y la de tus pertenencias más valiosas.
Tal como mencionamos en el video explicativo del motor a utilizar, para el funcionamiento del anemómetro será necesario que tengamos acceso al sensor de efecto Hall que “todos” los motores de este estilo traen incorporados en su placa. El nivel del pulso que nos brindará el sensor no será suficiente para ser leído por el microcontrolador, por lo tanto, tendremos que diseñar una etapa formadora de un impulso que sea apto para ser interpretado y utilizado en la cuenta que finalizará en la indicación de la velocidad del viento. A este trabajo lo realizaremos con un sencillo LM358, como muestra el circuito de la imagen inferior. Para la parte mecánica, utilizaremos varillas roscadas para colocar conos hechos en chapa galvanizada a 90° entre sí. Aquellos que quieran utilizar sólo 3 elementos capaces de capturar el viento y hacer rotar el eje del motor, deberán hacer el montaje cada 120°.

un circuito muy sencillo y una guía paso a paso de construcción de esta alarma concebida para cuidar tus circuitos.

Circuito para adaptar el impulso indicador de revoluciones del anemómetro

En la imagen inferior se aprecia claramente el mismo tipo de tapa plástica que la utilizada en la construcción de la veleta, con un motor al que se le han practicado 4 perforaciones en el tambor móvil (no en el cuerpo del estator) y al que se le han colocado varillas roscadas forradas en plástico. Los “conos” encargados de capturar el viento y hacer girar el sistema se han terminado con burletes de goma en sus bordes y están sujetos con tuercas a las varillas roscadas. Seguimos con la misma recomendación: la prolijidad y el esmero en la construcción mecánica permitirán un resultado altamente satisfactorio. Usa tu imaginación, obtén el máximo rendimiento de los materiales que tengas a tu alcance. El logro vale la pena.

conectividad USB

El anemómetro en su etapa inicial de construcción
En la próxima entrega
veremos el circuito utilizado en la unidad central y el desarrollo del
programa para el ordenador donde podremos ver los datos obtenidos por la
estación. Terminaremos de profundizar sobre los detalles constructivos,
la finalización de la construcción mecánica de la estación y veremos
algunos videos con pruebas realizadas. Te esperamos (Parte II).
|
Importante: Si lo que encuentras aquí te resulta útil, ayúdanos a mantener este sitio. Cualquier donación es bienvenida. Tu apoyo nos permitirá acceder a nuevos materiales y a montajes más interesantes y útiles. Gracias por ayudarnos a hacer Servisystem cada día mejor. Tu ayuda será muy importante para nosotros. Gracias. |